15.1 API Conventions¶
15.1.1 Function arguments¶
Naming Convention
In the definition of the MOSEK Optimizer API for C a consistent naming convention has been used. This implies that whenever for example numcon is an argument in a function definition it indicates the number of constraints. In Table 15.1 the variable names used to specify the problem parameters are listed.
API name |
API type |
Dimension |
Related problem parameter |
|---|---|---|---|
|
|
\(m\) |
|
|
|
\(n\) |
|
|
|
\(t\) |
|
|
|
|
\(a_{ij}\) |
|
|
|
\(a_{ij}\) |
|
|
|
\(a_{ij}\) |
|
|
|
\(a_{ij}\) |
|
|
|
\(c_j\) |
|
|
\(c^f\) |
|
|
|
|
\(l_k^c\) |
|
|
|
\(u_k^c\) |
|
|
|
\(l_k^x\) |
|
|
|
\(u_k^x\) |
|
|
\(q_{ij}^o\) |
|
|
|
|
\(q_{ij}^o\) |
|
|
|
\(q_{ij}^o\) |
|
|
|
\(q_{ij}^o\) |
|
|
\(q_{ij}^k\) |
|
|
|
|
\(q_{ij}^k\) |
|
|
|
\(q_{ij}^k\) |
|
|
|
\(q_{ij}^k\) |
|
|
|
\(q_{ij}^k\) |
|
|
|
\(l_k^c\) and \(u_k^c\) |
|
|
|
\(l_k^x\) and \(u_k^x\) |
The relation between the variable names and the problem parameters is as follows:
The quadratic terms in the objective: \(q_{ \mathtt{qosubi[t]}, \mathtt{qosubj[t]} }^o = \mathtt{qoval[t]},\quad t=\idxbeg,\ldots ,\idxend{\mathtt{numqonz}}.\)
The linear terms in the objective : \(c_j = \mathtt{c[j]},\quad j=\idxbeg,\ldots ,\idxend{\mathtt{numvar}}\)
The fixed term in the objective : \(c^f = \mathtt{cfix}.\)
The quadratic terms in the constraints: \(q_{\mathtt{qcsubi[t]},\mathtt{qcsubj[t]}}^{\mathtt{qcsubk[t]}} = \mathtt{qcval[t]},\quad t=\idxbeg,\ldots ,\idxend{\mathtt{numqcnz}}\)
The linear terms in the constraints: \(a_{\mathtt{asub[t],j}} = \mathtt{aval[t]}, \quad t=\mathtt{ptrb[j]},\ldots ,\mathtt{ptre[j]}-1,\ j=\idxbeg,\ldots ,\idxend{\mathtt{numvar}}\)
Passing arguments by reference
An argument described as T by reference indicates that the function interprets its given argument as a reference to a variable of type T. This usually means that the argument is used to output or update a value of type T. For example, suppose we have a function documented as
MSKrescodee MSK_foo (..., int * nzc, ...)
nzc(int by reference) – The number of nonzero elements in the matrix. (output)
Then it could be called as follows.
int nzc;
MSK_foo (..., &nzc, ...)
printf("The number of nonzero elements: %d\n", nzc)
Information about input/output arguments
The following are purely informational tags which indicate how MOSEK treats a specific function argument.
(input) An input argument. It is used to input data to MOSEK.
(output) An output argument. It can be a user-preallocated data structure, a reference, a string buffer etc. where MOSEK will output some data.
(input/output) An input/output argument. MOSEK will read the data and overwrite it with new/updated information.
15.1.2 Bounds¶
The bounds on the constraints and variables are specified using the variables bkc, blc, and buc. The components of the integer array bkc specify the bound type according to Table 15.2
Symbolic constant |
Lower bound |
Upper bound |
|---|---|---|
finite |
identical to the lower bound |
|
minus infinity |
plus infinity |
|
finite |
plus infinity |
|
finite |
finite |
|
minus infinity |
finite |
For instance bkc[2]=MSK_BK_LO means that \(-\infty < l_2^c\) and \(u_2^c = \infty\). Even if a variable or constraint is bounded only from below, e.g. \(x \geq 0\), both bounds are inputted or extracted; the irrelevant value is ignored.
Finally, the numerical values of the bounds are given by
The bounds on the variables are specified using the variables bkx, blx, and bux in the same way. The numerical values for the lower bounds on the variables are given by
15.1.3 Vector Formats¶
Three different vector formats are used in the MOSEK API:
Full (dense) vector
This is simply an array where the first element corresponds to the first item, the second element to the second item etc. For example to get the linear coefficients of the objective in task with numvar variables, one would write
MSKrealt * c = MSK_calloctask(task, numvar, sizeof(MSKrealt));
if ( c )
res = MSK_getc(task,c);
else
printf("Out of space\n");
Vector slice
A vector slice is a range of values from first up to and not including last entry in the vector, i.e. for the set of indices i such that first <= i < last. For example, to get the bounds associated with constrains 2 through 9 (both inclusive) one would write
MSKrealt * upper_bound = MSK_calloctask(task,8,sizeof(MSKrealt));
MSKrealt * lower_bound = MSK_calloctask(task,8,sizeof(MSKrealt));
MSKboundkeye * bound_key = MSK_calloctask(task,8,sizeof(MSKboundkeye));
res = MSK_getconboundslice(task, 2,10,
bound_key,lower_bound,upper_bound);
Sparse vector
A sparse vector is given as an array of indexes and an array of values. The indexes need not be ordered. For example, to input a set of bounds associated with constraints number 1, 6, 3, and 9, one might write
MSKint32t bound_index[] = { 1, 6, 3, 9 };
MSKboundkeye bound_key[] = { MSK_BK_FR, MSK_BK_LO, MSK_BK_UP, MSK_BK_FX };
MSKrealt lower_bound[] = { 0.0, -10.0, 0.0, 5.0 };
MSKrealt upper_bound[] = { 0.0, 0.0, 6.0, 5.0 };
res = MSK_putconboundlist(task, 4, bound_index,
bound_key,lower_bound,upper_bound);
15.1.4 Matrix Formats¶
The coefficient matrices in a problem are inputted and extracted in a sparse format. That means only the nonzero entries are listed.
15.1.4.1 Unordered Triplets¶
In unordered triplet format each entry is defined as a row index, a column index and a coefficient. For example, to input the \(A\) matrix coefficients for \(a_{1,2}=1.1, a_{3,3}=4.3\) , and \(a_{5,4}=0.2\) , one would write as follows:
MSKint32t subi[] = { 1, 3, 5 },
subj[] = { 2, 3, 4 };
MSKrealt cof[] = { 1.1, 4.3, 0.2 };
res = MSK_putaijlist(task,3, subi,subj,cof);
Please note that in some cases (like MSK_putaijlist) only the specified indexes are modified — all other are unchanged. In other cases (such as MSK_putqconk) the triplet format is used to modify all entries — entries that are not specified are set to \(0\).
15.1.4.2 Column or Row Ordered Sparse Matrix¶
In a sparse matrix format only the non-zero entries of the matrix are stored. MOSEK uses a sparse packed matrix format ordered either by columns or rows. Here we describe the column-wise format. The row-wise format is based on the same principle.
Column ordered sparse format
A sparse matrix in column ordered format is essentially a list of all non-zero entries read column by column from left to right and from top to bottom within each column. The exact representation uses four arrays:
asub: Array of size equal to the number of nonzeros. List of row indexes.aval: Array of size equal to the number of nonzeros. List of non-zero entries of \(A\) ordered by columns.ptrb: Array of sizenumcol, whereptrb[j]is the position of the first value/index inaval/asubfor the \(j\)-th column.ptre: Array of sizenumcol, whereptre[j]is the position of the last value/index plus one inaval/asubfor the \(j\)-th column.
With this representation the values of a matrix \(A\) with numcol columns are assigned using:
As an example consider the matrix
which can be represented in the column ordered sparse matrix format as
Fig. 15.1 illustrates how the matrix \(A\) in (15.1) is represented in column ordered sparse matrix format.
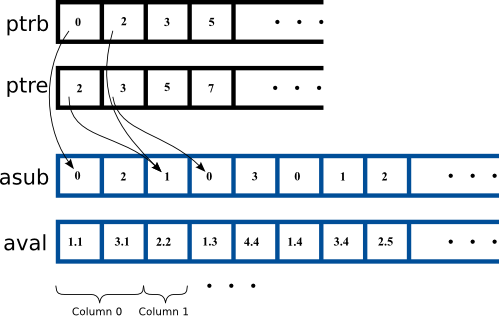
Fig. 15.1 The matrix \(A\) (15.1) represented in column ordered packed sparse matrix format.¶
Column ordered sparse format with nonzeros
Note that nzc[j] := ptre[j]-ptrb[j] is exactly the number of nonzero elements in the \(j\)-th column of \(A\). In some functions a sparse matrix will be represented using the equivalent dataset asub, aval, ptrb, nzc. The matrix \(A\) (15.1) would now be represented as:
Row ordered sparse matrix
The matrix \(A\) (15.1) can also be represented in the row ordered sparse matrix format as:
